UCL Depthmap 0.7.0 review by Alazar Assefa Wondim (Feb 23, 2021)
To use for academic purpose

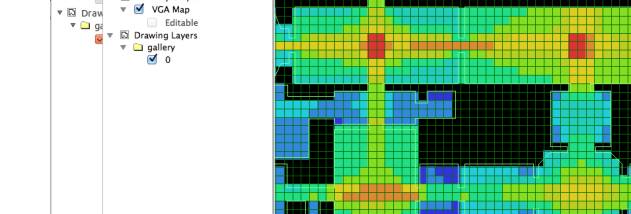
Discover the power of spatial analysis with UCL Depthmap, a cutting-edge software developed by the prestigious University College London. This innovative tool is designed to perform visibility graph analysis, axial line analysis, and more, making it an indispensable resource for architects, urban planners, and social scientists. With UCL Depthmap, you can delve into the intricate dynamics of spatial systems, gaining valuable insights that can guide your design or research decisions. This Windows 10 compatible software is a must-have for anyone seeking to explore the depth and complexity of spatial environments.
| Author: | University College London |
| License: | Open Source |
| Price: | FREE |
| Released: | Nov 8, 2020 |
| File size: | 35.10 MB |
| Downloads: | 752 |
| Keywords: | map, Spatial Network Analysis, environment, UCL Depthmap, urban environment, Architectural Research Tool, Urban Planning Software, urban map, analysis, Space Syntax Analysis, University College London Software, spatial network analysis |
| Author URL: | http://www.depthmap.org/ |
Welcome to your one-stop destination for downloading the innovative "UCL Depthmap" software, a unique creation by the esteemed University College London. This software is a multi-platform spatial network analysis tool that provides a comprehensive set of analysis techniques, making it an indispensable tool for architects, urban designers, and researchers in the field of spatial networks.
UCL Depthmap offers a range of features designed to enhance your spatial analysis experience. It allows you to create axial, convex and segment maps, and perform a variety of analyses such as integration, choice and intelligibility analysis. It also supports VGA, agent-based pedestrian and visibility graph analysis.
The software is designed to be user-friendly, with a clear interface and easy navigation. It also provides a robust platform for the development of new algorithms and techniques, making it a dynamic tool that evolves with the needs of its users.
Whether you're a seasoned professional or a student just starting out, UCL Depthmap is a powerful tool that can assist you in understanding and visualizing spatial patterns and relationships. Download it today and elevate your spatial network analysis to new heights!
To use for academic purpose